Analytical model for full film lubrication
In this post, a first model for full film lubrication is proposed. It will allow to determine the seal faces temperature, the thickness of the film between the faces, the friction torque, etc.
If the distance between the faces is assumed to be equal to the mean film thickness, the dissipated power by viscous friction is:
^2}{4 h_m}")
This power is transferred to the seal rings by conduction. According to post# 1, we have:
^2}{4 h_m}")
According to post# 3, the film thickness is given by:
}")
The coning angle  is due to the faces deformations as explained in post #2:
is due to the faces deformations as explained in post #2:

Finally, the fluid viscosity  is a function of the local temperature. By using an exponential law, we have:
is a function of the local temperature. By using an exponential law, we have:
=\mu_0 \exp \left(-\alpha \Delta T\right)")
where  is the viscosity at the reference temperature and
is the viscosity at the reference temperature and  the thermoviscosity coefficient.
the thermoviscosity coefficient.
A non linear equation of the seal faces temperature is obtained:
} \omega^2 S_f \frac{ \left( r_o+r_i \right)^2 \left( B_t-0.5 \right) }{ \left( N \Delta T+\beta_e \right) \Delta R }")
It is convenient to use a dimensionless form of this equation. For that a temperature scale based on the thermoviscosity coefficient is used:

Then the previous non linear equation temperature becomes:
}\frac{Se}{\bar{T} + Co}")
In this equation  is the sealing number and is a kind of thermal loading number of the seal face:
is the sealing number and is a kind of thermal loading number of the seal face:
^3\left( B_t-0.5 \right) }{E_t N }")
The second dimensionless number,  , is the coning number. It represents an initial coning of the faces due to mechanical loading (fluid pressure) or wear of the faces:
, is the coning number. It represents an initial coning of the faces due to mechanical loading (fluid pressure) or wear of the faces:

According to governing equation, the seal faces temperature rises with the sealing number, . However, the magnitude of this temperature is reduced by the decrease in viscosity with temperature (exponential term) and the increase in film thickness with temperature (denominator). A positive initial coning number,  , will increase the film thickness and thus reduce temperature whereas a negative value will produce the invert.
, will increase the film thickness and thus reduce temperature whereas a negative value will produce the invert.
The governing equation can be easily solved by using Excel for example. When the temperature of the faces is known, it is then possible to compute the film thickness, the leakage flow, the friction torque, etc. The next figure presents the dimensionless temperature rise as a function of the sealing number for different values of the coning number.
 In the case of negative coning number, the temperature can not be lower than
In the case of negative coning number, the temperature can not be lower than  to avoid negative coning and film thickness. This situation is not realistic and will lead to faces contact. To analyze
to avoid negative coning and film thickness. This situation is not realistic and will lead to faces contact. To analyze
this effect, the minimum film thickness can be expressed in a dimensionless form:

 The film film thickness is presented as a function of the sealing number; , for different values of the coning number in the next figure. As expected the film thickness is an increasing function of . For positive coning number, the minimum film thickness can not decrease below a threshold avoiding faces contact. For negative or null values of , the film thickness can reach zero at low sealing number values. In this case face contact will be experienced. According to my experience, the dimensionless film thickness corresponding to the appearance of contact (three times the r.m.s roughness height), is approximately equal to 0.5. Above this value, the present model is correct. Below this threshold mixed lubrication is expected to occur. This boundary between full film and mixed lubrication regimes has been added on the temperature map (dashed curve):
The film film thickness is presented as a function of the sealing number; , for different values of the coning number in the next figure. As expected the film thickness is an increasing function of . For positive coning number, the minimum film thickness can not decrease below a threshold avoiding faces contact. For negative or null values of , the film thickness can reach zero at low sealing number values. In this case face contact will be experienced. According to my experience, the dimensionless film thickness corresponding to the appearance of contact (three times the r.m.s roughness height), is approximately equal to 0.5. Above this value, the present model is correct. Below this threshold mixed lubrication is expected to occur. This boundary between full film and mixed lubrication regimes has been added on the temperature map (dashed curve):

It is now necessary to consider contact between the surfaces of the seal.
References
Brunetière, N. & Apostolescu, A. A Simple Approach to the ThermoElastoHydroDynamic Behavior of Mechanical Face Seals Tribology Transactions, 2009, 52, 243-255







 is governed by the following Reynolds equation:
is governed by the following Reynolds equation: =0")
 , the radius
, the radius  and the film thickness
and the film thickness  are linearly linked:
are linearly linked:")
=0")
=p_o\left( \frac{h_o^2}{h^2}\frac{h^2-h_i^2}{h_o^2-h_i^2}\right)")
 , the fluid opening force
, the fluid opening force  is obtained as a function of the film thickness and the outer pressure
is obtained as a function of the film thickness and the outer pressure  :
:
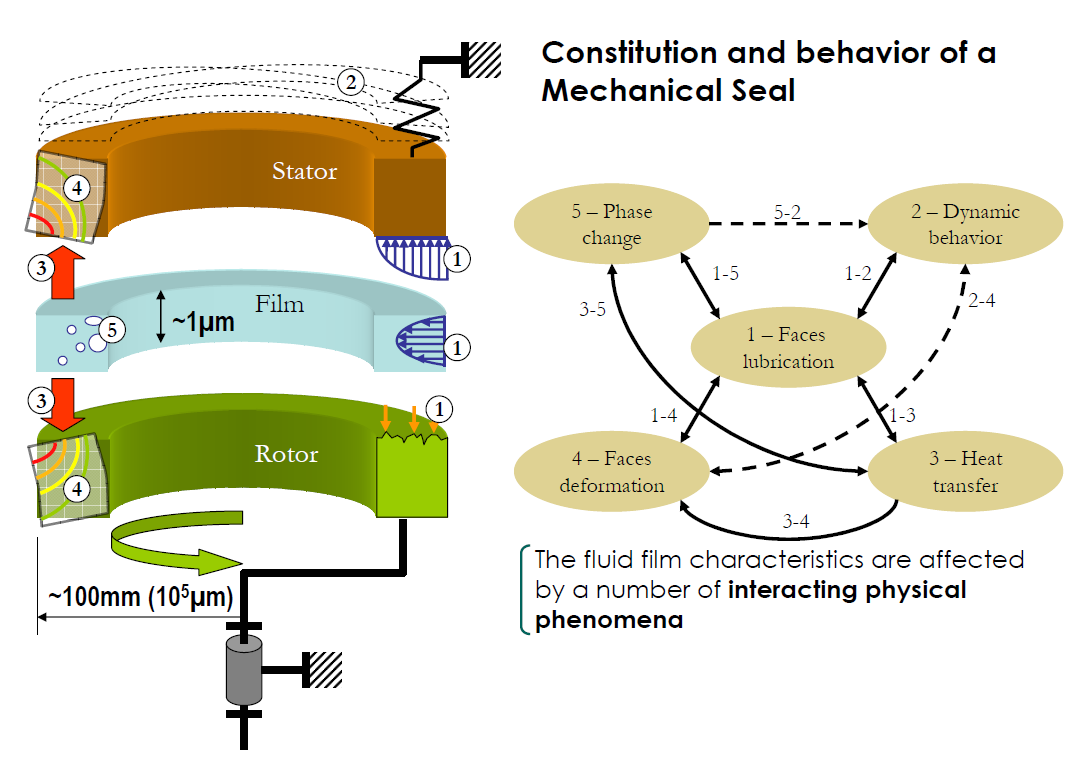
 due to the sealed fluid pressure and elastic elements. These forces are described on the next figure.
due to the sealed fluid pressure and elastic elements. These forces are described on the next figure.
S_f=p_oB_tS_f")
 is a global balance ratio including the effect of the fluid and the spring force
is a global balance ratio including the effect of the fluid and the spring force  . If the fluid pressure is high enough, the total balance ratio is equal to seal balance ratio
. If the fluid pressure is high enough, the total balance ratio is equal to seal balance ratio 


 . This angle is proportional to the seal face temperature rise
. This angle is proportional to the seal face temperature rise  leading to the following rotation:
leading to the following rotation:
 is the thermal rotation rate. It is important to note that for many seal rings design, the coefficient
is the thermal rotation rate. It is important to note that for many seal rings design, the coefficient  is due to the mechanical loading generated by the sealed fluid pressure and the springs, O-rings, etc. Unfortunately, there exists no analytical solution of this problem and these angles must be calculated by FEA. However, these coefficients remain constant as long as the boundary conditions are unchanged. For example, the next figure presents the evolution of
is due to the mechanical loading generated by the sealed fluid pressure and the springs, O-rings, etc. Unfortunately, there exists no analytical solution of this problem and these angles must be calculated by FEA. However, these coefficients remain constant as long as the boundary conditions are unchanged. For example, the next figure presents the evolution of  as a function of
as a function of  for a rectangular ring of length
for a rectangular ring of length  , width
, width  and radii ratio of 0.88. Here
and radii ratio of 0.88. Here  is the thermal expansion coefficient of the material.
is the thermal expansion coefficient of the material.
 . This parameter in mechanical seal can be evaluated using the Becker’s correlation (Becker 1963).
. This parameter in mechanical seal can be evaluated using the Becker’s correlation (Becker 1963). . The average resulting temperature rise of the face is
. The average resulting temperature rise of the face is  . Let us introduce the thermal efficiency
. Let us introduce the thermal efficiency  of the ring 1 defined as the ratio of the thermal power
of the ring 1 defined as the ratio of the thermal power  entering the face to the average temperature rise.
entering the face to the average temperature rise.\frac{q_1}{\Delta T_1}")
 and
and  are respectively the outer and inner radii of the seal interface.
are respectively the outer and inner radii of the seal interface. is very small compared to the ring length
is very small compared to the ring length  can be found using the fin theory (Buck, 1989):
can be found using the fin theory (Buck, 1989):
 is a heat transfer parameter including
is a heat transfer parameter including  :
:


 , a global thermal efficiency
, a global thermal efficiency  , being the sum of the two individual thermal efficiencies, can be defined. The total thermal power
, being the sum of the two individual thermal efficiencies, can be defined. The total thermal power  entering the seal faces is thus:
entering the seal faces is thus:\Delta T")